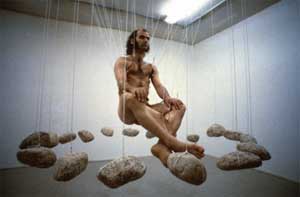
The Walkerbot lives! Here are some pictures of the walking Waistcloth-smattered-retroacting_walkerbot. Notice the carriage behind the walker bot. This carriage is the power-source for the walker, not only does it supply energy, but it also represents a simpler time when carriages were used and waist cloths were worn.
The legs at the front of the robot represent an evolution in locomotion ideas throughout time. While both front and rear servos are powered, the legs can take the robot past obstacles that the wheels cannot. Like in the evolution of robotics, in response to obstacles that wheels cannot transverse, legs began to be used.
This design shows a smattering in the field of robotics, as the power supply is so far separated from the drive and systems on the robot. Any snag or jam will make the power supply disconnect from the robot without any backup. The robot then dies and can no longer travel. In this design it is also possible that the robot forces the power disconnect itself, which is never a good idea (spare Asimov's 3 laws).
Code used:
//Robotization, Waistcloth, Smatter, Retroact
// Konstantin Avdashchenko
int valu;
void setup () {
// set 9 and 10 and the outputs to the servo controls
pinMode(9, OUTPUT);
pinMode(10, OUTPUT);
}
void loop(){
// read a potentiometer value and command servo speed according to it.
valu = analogRead(0);
analogWrite(9,valu/4);
analogWrite(10,255-valu/4);
delay(10);
}